Kurbelgenerator
|
Motivation / Grundidee Was ist der |
Ich habe alte Modellbaumotoren |
|
Platzbedarf Wo und wieviel Platz wird dauerhaft |
Erstmal keiner, |
|
Ab wann / wie lange Ab wann soll es los gehen? Wie lange wirst du vorraussichtlich brauchen? |
Start Mitte Oktober 2022, Abschluss (bis v3) Juli 2024. |
|
Kontakt Name, Email oder Telefonnummer? |
Thomas Kolb ( |
Projekt-Metadaten
Mit welchen GerätenGeräten und Werkzeugen wurde gearbeitet?
Geplant ist, das Gestell mit dem Lasercutter ausschneiden und zusammenstecken zu können.können.
Welche Materialien wurden verwendet?
Es ist noch nicht entschieden, ob fürfür das Gestell am Ende Acryl oder Holz verwendet wird (ich tendiere zu Holz/HDF).
FürFür die KraftübertragungKraftübertragung kommt aufgrund der guten VerfügbarkeitVerfügbarkeit ein GT2-Zahnriemen zum Einsatz, der gerne auch bei 3D-Druckern und kleinen CNC-FräsenFräsen verwendet wird.
Wie lange hat es gedauert?
noch unbekannt
Logbuch / Schritte
Auswahl der Komponenten
Mechanik
Als Zahnriemen wird ein GT2-Riemen mit 6mm Breite gewählt,gewählt, da sich dafürdafür gut ein Zahnrad aus 2 3mm-Platten herstellen lässt.lässt.
Alle beweglichen Teile sollen kugelgelagert sein.
FürFür die Achse kommen Kugellager zum Einsatz, die auch fürfür Inlineskates verwendet werden. Diese haben 22mm Außen-Außen- und 8mm Achsdurchmesser. Sie könnenkönnen somit gut auf einer M8-Schraube befestigt werden.
Um den Riemen spannen zu können,können, ist eine gelagerte Umlenkrolle nötig.nötig. Diese gibt es mit 5mm Achsdurchmesser.
Meine Modellbaumotoren haben zur Montage des Propellers ein AußengewindeAußengewinde mit 5mm Durchmesser (d.h. M5). Darauf wird ein GT2-Zahnrad mit 16-20 ZähnenZähnen zur KraftübertragungKraftübertragung montiert.
Die Auswahl konkreter Teile wird hier dokumentiert, sobald sie abgeschlossen ist.
Elektrik
In diesem Abschnitt gibt es bisher vor allem Ideen und Pläne.Pläne. Was funktioniert, muss erst noch ermittelt werden.
Als Generator wird ein bürstenloserbürstenloser Gleichstrommotor aus dem Modellbau verwendet. Das verfügbareverfügbare Modell ist auf Motorbetrieb mit >10 A Strom aus einem 3S-LiPo-Akku ausgelegt und liefert eine Drehzahl von mehreren tausend RPM. Entsprechend hoch muss im Generatorbetrieb die Drehzahl sein. Mit der hier geplanten 30:1-ÜbersetzungÜbersetzung sollten 2000 bis 3000 RPM erreicht werden können.können.
Der Generator liefert Dreiphasen-Drehstrom. Dieser wird mit einem Dreiphasen-BrückengleichrichterBrückengleichrichter aus Schottky-Dioden gleichgerichtet. Ich erwarte, dass ca. 5V bei bis zu 5 A Strom erreicht werden (mehr als 25W wird mit einer Handkurbel anstrengend, glaube ich).
Damit könntekönnte man beispielsweise ein Handy laden oder mit einem AufwärtswandlerAufwärtswandler eine höherehöhere Spannung erzeugen.
Sehr interessant fändefände ich, einen MPPT-Regler anzubringen, der den Generator so belastet, dass die maximale Leistung entnommen wird. Dadurch wird quasi die Belastung des Kurbelnden optimiert :)
Entwurf des Gestells in OpenSCAD
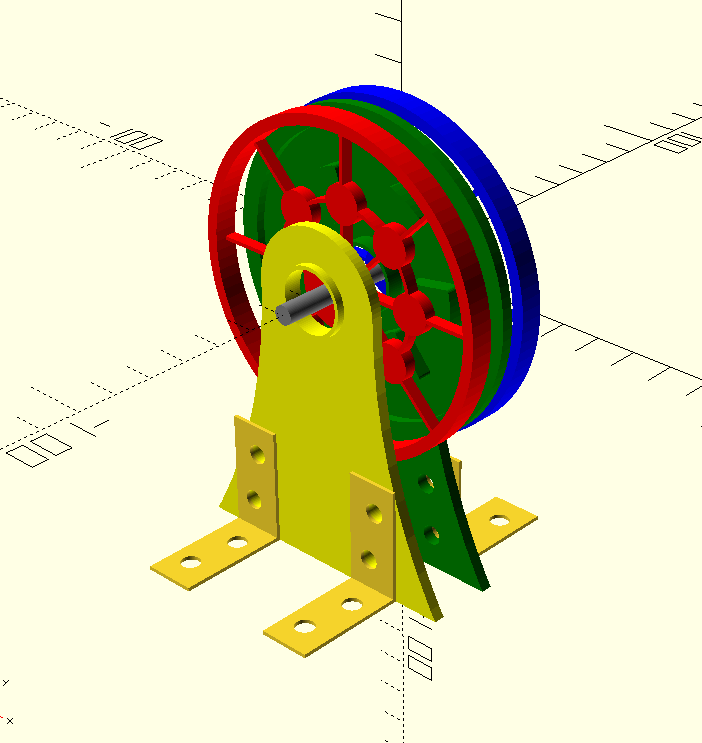
Erster Entwurf
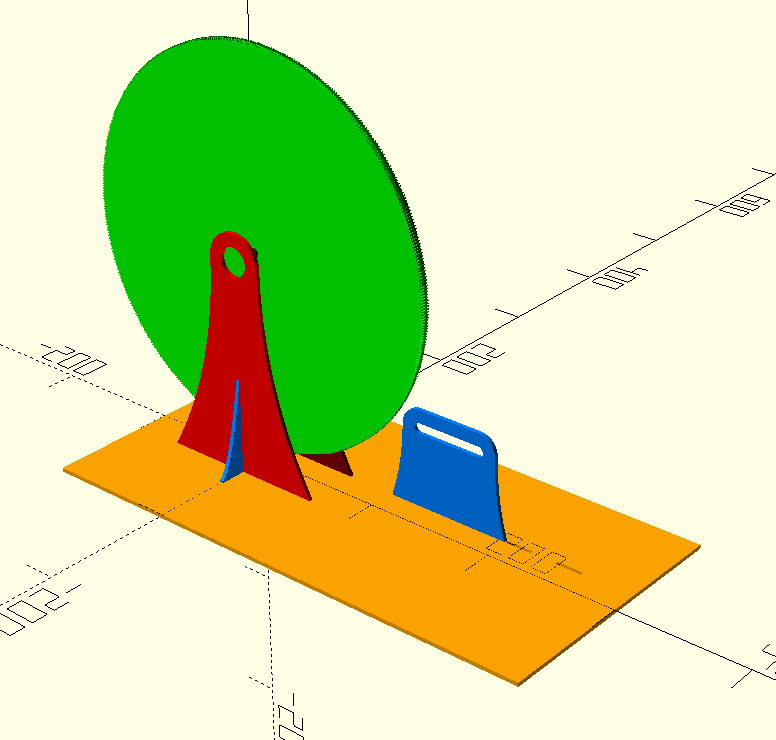
Ein erster Entwurf vom 15. Oktober 2022. Das großegroße Zahnrad (grün)grün) hat 460 Zähne.Zähne. Die Montageplatte fürfür den Motor/Generator fehlt noch. Die blaue Platte mit dem Schlitz dient zur Befestigung der Umlenkrolle zum Spannen des Riemens.
AbschätzungAbschätzung der RiemenlängeRiemenlänge in Inkscape
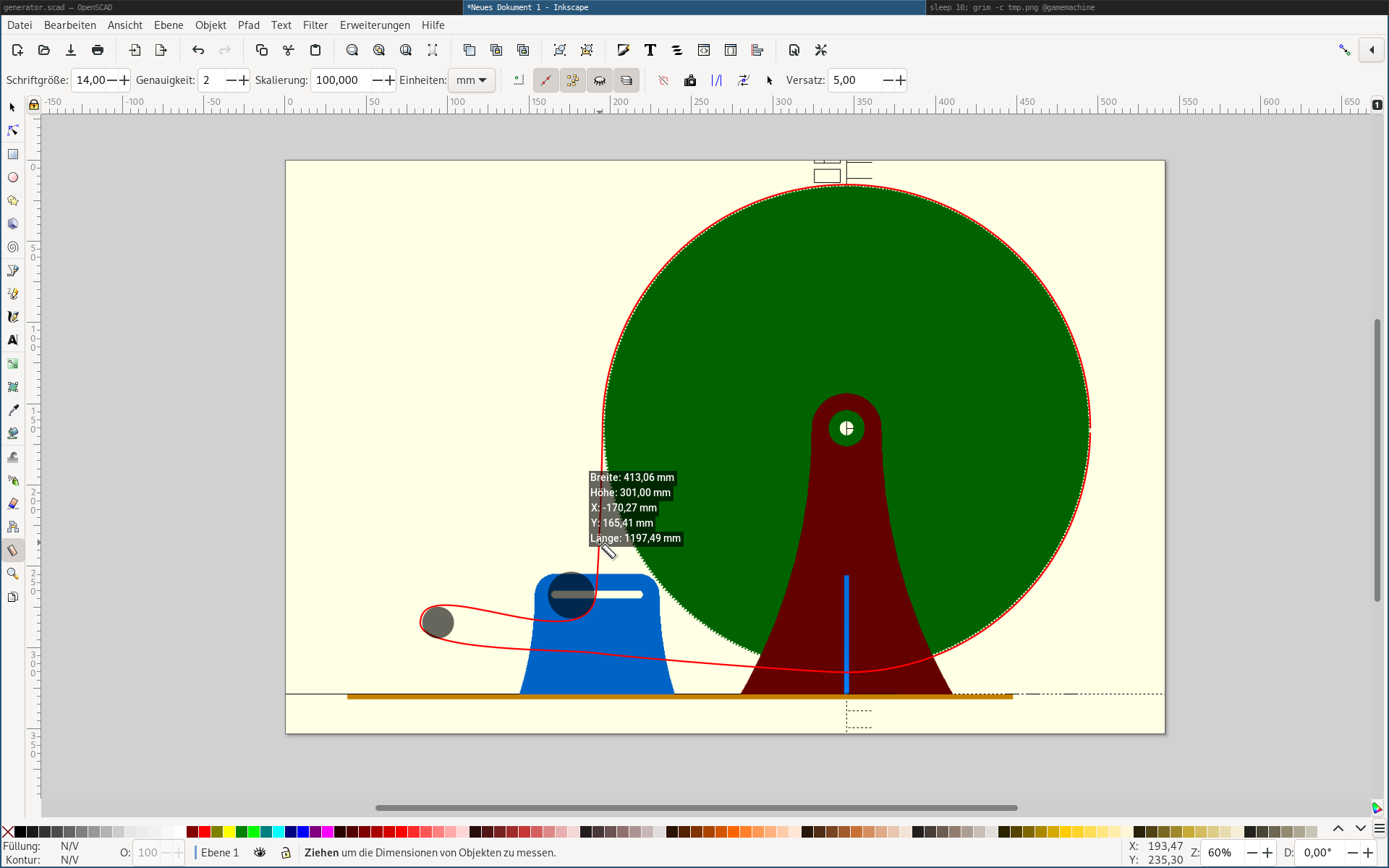
Zur AbschätzungAbschätzung der nötigennötigen RiemenlängeRiemenlänge kann Inkscape verwendet werden. Dazu zeichnet man zuerst einen Kreis mit dem wahren AußenradiusAußenradius des großengroßen Zahnrads.
Nun wird ein Screenshot von der Seitenansicht des OpenSCAD-Modells erstellt und in Inkscape eingefügt.eingefügt. Der Screenshot muss so scaliert werden, dass sich das großegroße Zahnrad exakt mit dem schon vorhandenen Kreis deckt.
Als Modell fürfür die Umlenkrollen werden an der entsprechenden Stelle weitere Kreise eingefügt.eingefügt.
Dann wird der großegroße Kreis überüber Pfad→Pfad→Objekt in Pfad umwandeln in einen Pfad konvertiert, der mit dem Knotenwerkzeug manipuliert werden kann. Durch geschicktes Hinzufügen,Hinzufügen, Ziehen und Drehen von Knoten kann so der Verlauf des Riemens gut aus dem Kreis modelliert werden (eine detaillierte Beschreibung würdewürde diese Seite sprengen, daher verweise ich auf die Inkscape-Doku).
Ist der Pfad so fertig modelliert, kann dessen LängeLänge einfach mit dem Messwerkzeug angezeigt werden. Das Endergebnis sieht wie folgt aus und zeigt uns, dass 1,2 m eine gute LängeLänge fürfür den Riemen ist.
Finaler Entwurf
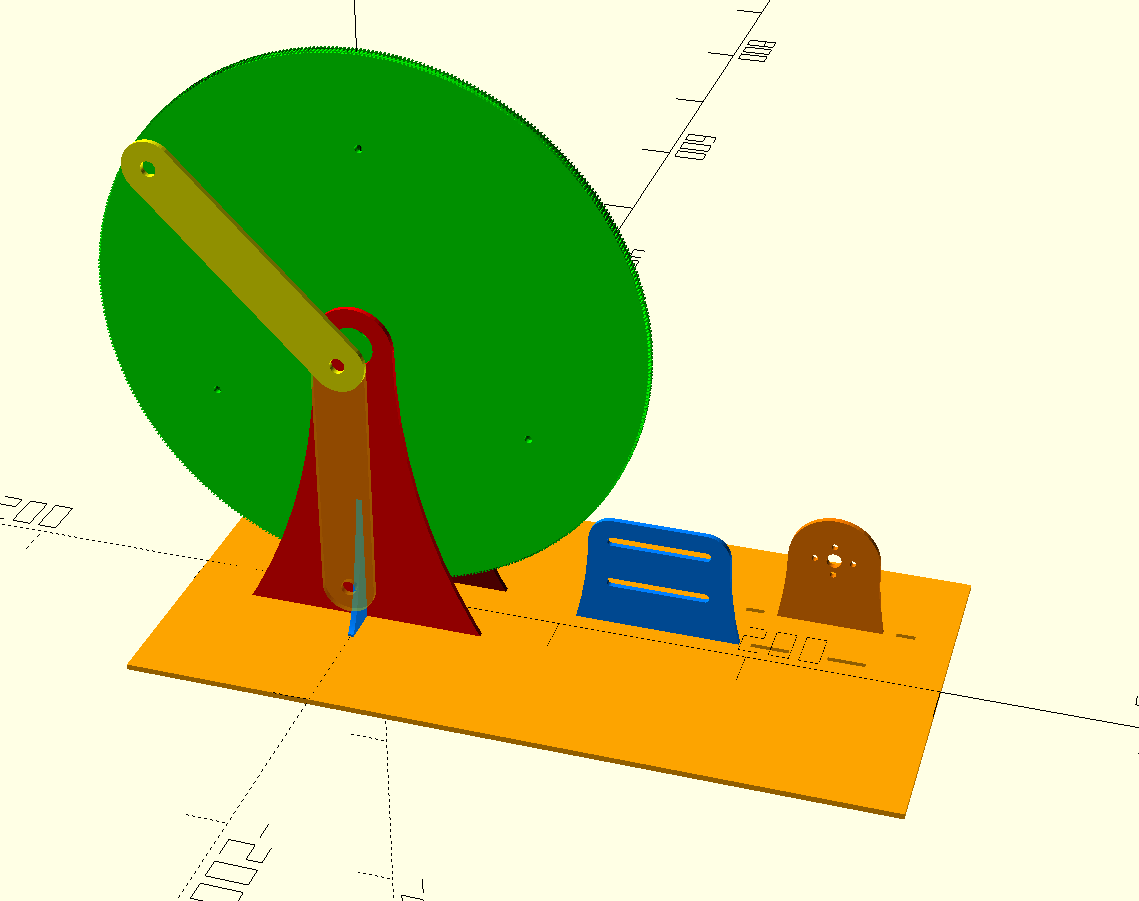
Das folgende Bild zeigt den finalen Entwurf. Neu sind die Halterung fürfür den Generator, die Handkurbel und ein zusätzlicherzusätzlicher Schlitz fürfür eine zweite Führungsrolle.Führungsrolle. Das großegroße Zahnrad, das aus zwei Lagen besteht, hat jetzt außerdemaußerdem LöcherLöcher zum Zusammenschrauben der beiden Lagen.
Überall,Überall, wo Teile ineinander gesteckt werden, sind 0,2 mm Schnittbreite des Lasers berücksichtigtberücksichtigt (d.h. die MaßeMaße von Ausschnitten werden in allen Richtungen um 0,1 mm verkleinert).
Erster Aufbau
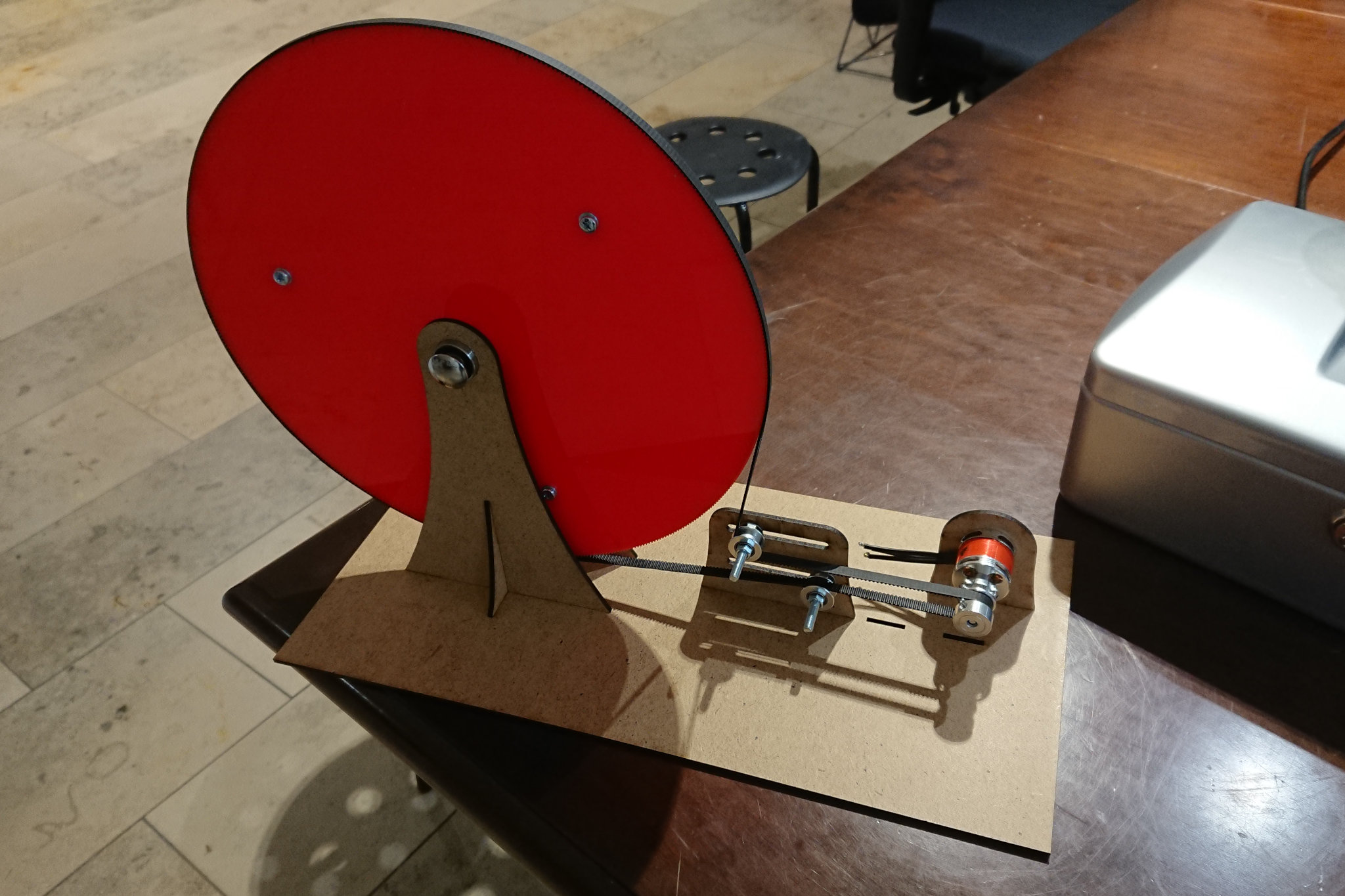
FürFür einen ersten Aufbau habe ich das Zahnrad aus Acryl und den restlichen Aufbau aus HDF-Platten ausgeschnitten. Das Zusammenstecken funktioniert super und hälthält auch ohne Leim fürfür erste Versuche gut genug zusammen. Die Schnittbreite mit 0,2 mm halte ich jedoch fürfür das Limit, da die Teile schon schwer zusammenzufügenzusammenzufügen waren (ein Hammer war nötignötig ;-) ). 0,15 mm würdenwürden ggf. auch reichen.
Hier ist ein Foto des Aufbaus, allerdings noch ohne Kurbel:
Erste Erkenntnisse:
- Die Grundidee funktioniert :)
- Presspassung der Kugellager funktioniert super, wenn man die Laserschnittbreite
berücksichtigtberücksichtigt (siehe oben) - Die beiden Platten des
großengroßen Zahnradsmüssenmüssen sehrpräzisepräzise ausgerichtet werden. Aktuell eiert dieses ziemlich und der Riemenfälltfällt nach wenigen Umdrehungen herunter. - Die Reibung ist trotz Kugellagern nicht unerheblich
Erste Tests
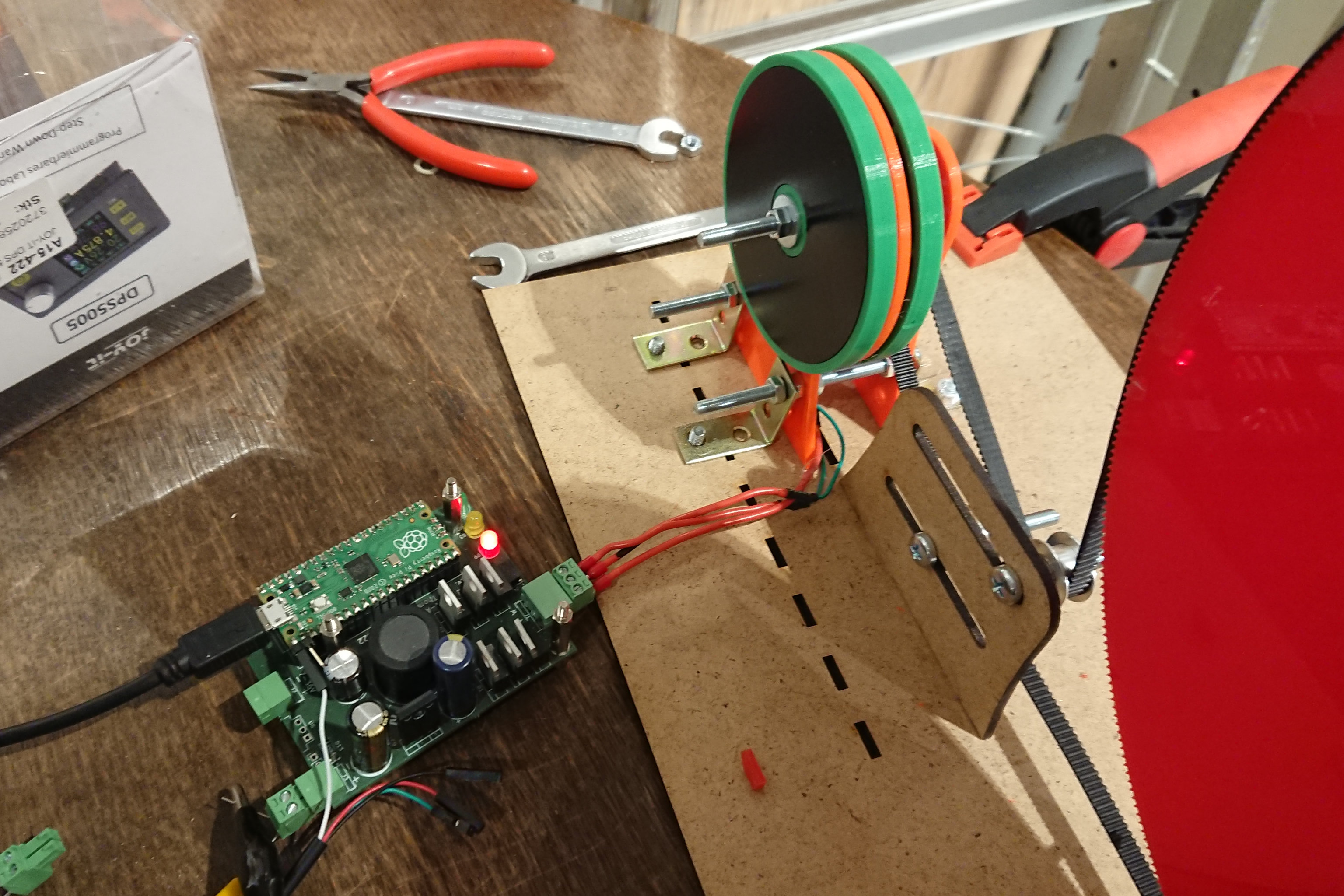
Nachdem ich die beiden Platten des Zahnrads neu ausgerichtet habe (es scheint hier um zehntel Millimeter zu gehen!), bleibt der Riemen fürfür längerelängere Zeit auf dem Rad. So konnten wir erste Experimente mit Stromerzeugung machen. Als provisorische Kurbel kam ein SchraubenschlüsselSchraubenschlüssel zum Einsatz.
Als ersten Versuch habe ich einen Dreiphasen-BrückengleichrichterBrückengleichrichter aus Hochstrom-Schottkydioden angeschlossen. Durch die Dioden gehen ca. 0,4 V verloren. Trotz dieses Verlusts konnten wir mit diesem Aufbau bis zu 3 V Gleichspannung erzeugen, die ausreichten, um eine LED-Leiste fürfür 2x AA-Batterien zum Leuchten zu bringen. Der Kurzschlussstrom betrug mit dem BrückengleichrichterBrückengleichrichter ca. 1,0 Ampere. Hier besteht also durchaus Potenzial, einen AufwärtswandlerAufwärtswandler anzuschließen,anzuschließen, der die 2-3 V auf 5V anhebt, um ein Handy zu laden :)
Im zweiten Versuch haben wir mit einphasigen Hochspannungskaskaden experimentiert (wobei Hochspannung hier relativ zu sehen ist ;-) ). Aufgebaut haben wir eine dreistufige Kaskade, die Spitzenspannung der Phase sollte also etwa verdreifacht werden. Als Bauteile kamen die bereits fürfür den BrückengleichrichterBrückengleichrichter verwendeten Schottkydioden und Elektrolytkondensatoren mit 1000 μFμF zum Einsatz. TatsächlichTatsächlich konnten wir auf diese Weise etwa 6V erzeugen und einem 6V-GlühlämpchenGlühlämpchen zu angemessener Helligkeit verhelfen :-) .
Elektronik
Da der Kurbelgenerator nur wenig Spannung, aber dafürdafür ordentlich Strom liefert, muss eine MöglichkeitMöglichkeit gefunden werden, diese Leistung nutzbar zu machen. FürFür maximale FlexibilitätFlexibilität entwerfe ich eine AufwärtswandlerAufwärtswandler auf Basis des Raspberry Pi Pico.
Hardware
Die Hardware wird mit KiCad 6 erstellt. Die Projektdateien sind in einem Git-Repository zu finden.
Hier ist der vollständigevollständige Schaltplan:

Der Schaltwandler
Oben ist der „Hochstrompfad“„Hochstrompfad“ zu sehen: er beginnt mit dem dreipoligen Anschluss des Generators, gefolgt vom Dreiphasen-Brückengleichrichter.Brückengleichrichter. Die gleichgerichtete Spannung wird in einem Kondensator (C4) gepuffert. Dieser ist relativ klein und soll nur die Schwingungen des Schaltwandlers etwas ausgleichen; die niederfrequente Schwingung, die durch die Gleichrichtung entsteht, wird nicht gesiebt, sondern soll von der Regelung des Schaltwandler ausgeglichen werden. Es folgt ein Spannungsteiler zur Spannungsmessung. Danach kommt das HerzstückHerzstück des Wandlers: die Speicherdrossel L1, der Leistungs-MOSFET Q1, die Diode D11/D12 (alternativ verwendbar) und der Kondensator C9. Diese Bauteile sorgen dafür,dafür, dass am Ausgang eine höherehöhere Spannung entstehen kann als am Eingang verfügbarverfügbar ist.
Eine kurze ErklärungErklärung der Funktionsweise des Wandlers: Wird Q1 eingeschaltet, liegt die volle Eingangsspannung an L1 an und ein Strom beginnt zu fließen.fließen. So wird Energie im Magnetfeld von L1 gespeichert. Nach einer gewissen Zeit wird Q1 abgeschaltet. L1 versucht nun, den Strom aufrecht zu erhalten, so dass die Spannung an Q1 ansteigt (theoretisch so weit, dass der Transistor zerstörtzerstört wird). Die Spannung steigt, bis sie diejenige von C9 übersteigt,übersteigt, weil dann die Diode D11 zu leiten beginnt und ein Strom durch L1 und C9 fließenfließen kann. Die Energie von L1 wird also in C9 übertragen,übertragen, und zwar weitgehend unabhängigunabhängig von der an C9 vorhandenen Spannung.
Nach dem Wandler C9 folgt noch etwas Ausgangsbeschaltung: R11 und R12 dienen der Strommessung; dazu späterspäter mehr. Der nachfolgende Spannungsteiler dient wieder der Messung der Ausgangsspannung und zu guter Letzt folgt eine Abzweigung, die es ermöglicht,ermöglicht, den Wandler direkt aus der Ausgangsspannung zu betreiben (z.B., wenn dort ein Akku angeschlossen wird).
Strom- und Spannungsmessung
FürFür die Strom- und Spannungsmessung kommt ein dedizierter Analog-Digital-Umsetzer, der MCP3204 (U1, links unten), zum Einsatz. Dieser bietet erheblich bessere Genauigkeit als der im Raspberry Pi Pico integrierte ADU. Der Pico kommuniziert mit dem Wandler überüber SPI. Vier KanäleKanäle sind verfügbarverfügbar und werden wie folgt verwendet:
- Ausgangsspannung des
StrommessverstärkersStrommessverstärkers - Referenzspannung des
StrommessverstärkersStrommessverstärkers - Heruntergeteilte Ausgangsspannung
- Heruntergeteilte Eingangsspannung
Die Spannungsmessung erfolgt überüber Spannungsteiler, die zum einen die Spannung in den Messbereich des ADCs bringen sollen, zum anderen dessen EingängeEingänge vor BeschädigungBeschädigung durch unerwartet hohe Spannungspulse schützenschützen sollen (denn bei der Eingangsspannung wärewäre das Herunterteilen nicht unbedingt nötig)nötig). Beide Spannungsteiler haben einen Kondensator zur Stabilisierung der Messspannung.
Die Strommessung ist etwas schwieriger: hier kommt ein spezieller Strommessverstärker,Strommessverstärker, der MAX9918, zum Einsatz. Dieser kann die Spannung überüber einem Messwiderstand, der in der Plus-Leitung liegt, messen, verstärkenverstärken und das Ergebnis auf eine frei definierbare Referenz bezogen ausgeben. Die Referenz wird hier mit Hilfe des OperationsverstärkersOperationsverstärkers U4 auf ca. 50 mV festgelegt, um auch 0 A Ausgangsstrom sauber messen zu können.können. Da die Referenzspannung auch am ADU anliegt, kann der Strom jederzeit exakt berechnet werden.
Ansteuerung des Schaltwandlers
Der Schalttransistor Q1 ist ein Logik-Level-MOSFET, d.h. er kann schon mit geringer Steuerspannung am Gate hohe StrömeStröme schalten (Laut Datenblatt 20A bei 3V Gate-Spannung). Der Ausgangspin des Pico würdewürde theoretisch bereits reichen, um die erwarteten StrömeStröme zu schalten, zur Sicherheit ist aber noch ein TTL-XOR-Gatter zwischen Pico-Ausgang und MOSFET-Gate geschaltet, das die Spannung auf 5V anhebt und möglicherweisemöglicherweise etwas mehr Strom liefern kann. So sollten schnelle SchaltvorgängeSchaltvorgänge sichergestellt sein.
Sonstiges
Es gibt noch einige sonstige Bauteile auf der Platine, die bestimmte MöglichkeitenMöglichkeiten fürfür die Zukunft offen halten sollen. Z.B. gibt es einen 5V-DC-DC-Wandler, der die Schaltung entweder aus der Ausgangsspannung (überüber D13) oder aus einer extern eingespeisten Spannung versorgt. Dadurch kann die Schaltung nach Bedarf unabhängigunabhängig vom USB-Anschluss des Picos betrieben werden.
AußerdemAußerdem sind drei LEDs vorgesehen, die vom Pico fürfür Statusinformationen verwendet werden können.können.
Zum Debuggen des Mikrocontrollers gibt es einen 10-poligen SWD-Anschluss.
Und auch nicht fehlen darf natürlichnatürlich der Reset-Button.
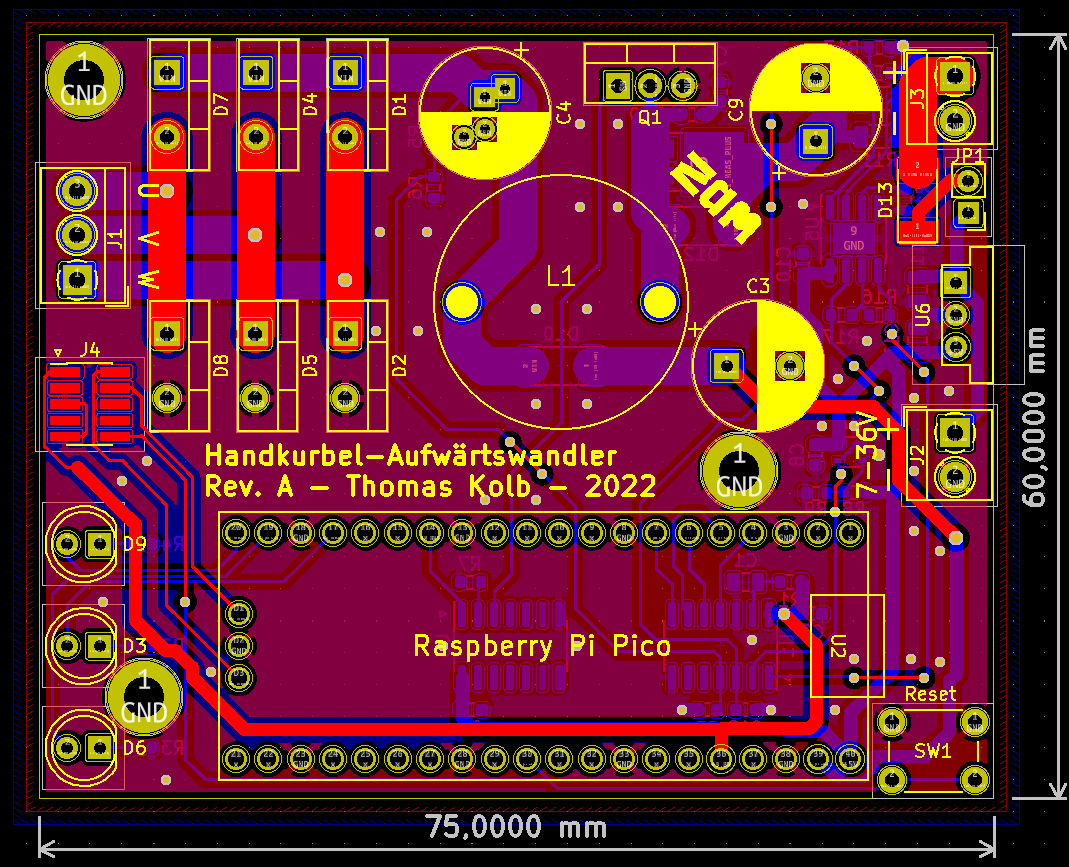
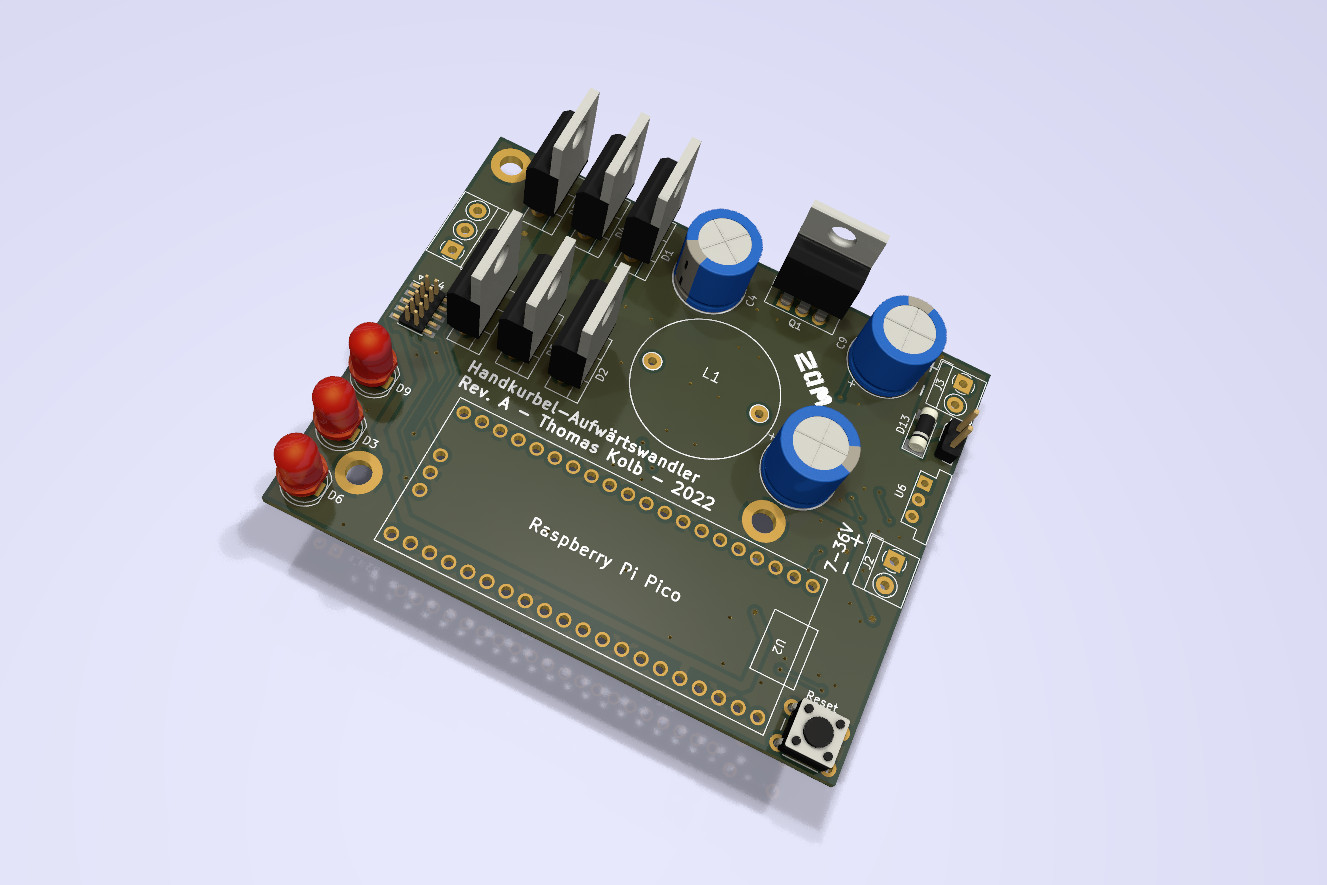
Layout
Hier ein Screenshot des Layouts in KiCad und ein 3D-Rendering der Platine:
Fertigungszustand
Stand 2022-12-14: Die Platinen wurden geliefert :) Die Bauteile sind auch schon unterwegs und sollten die nächstennächsten Tage eintreffen.
Hier ein Foto der noch leeren Leiterplatten:
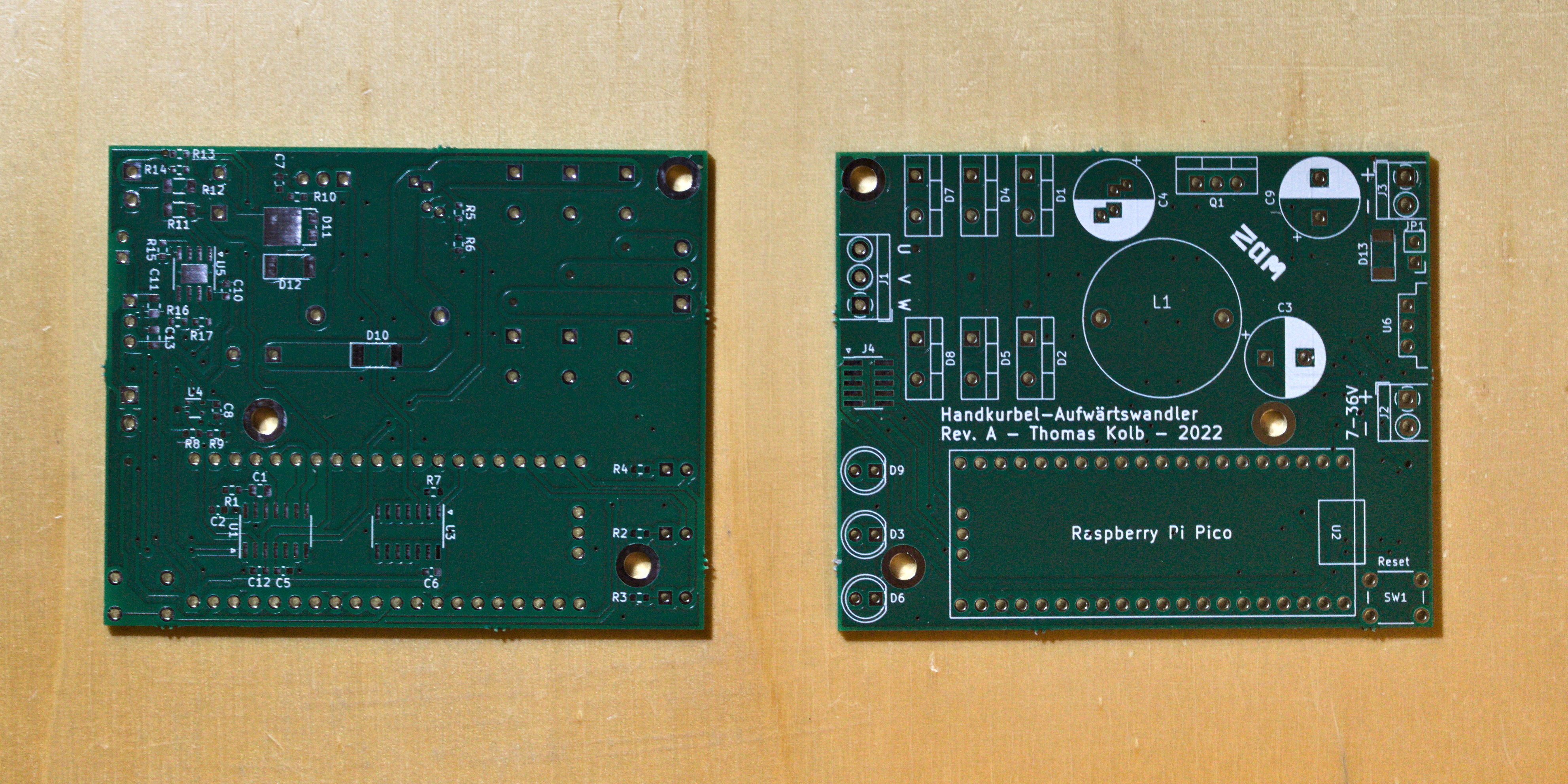
Bilder der bestücktenbestückten Platine folgen.
Ergebnisse
Mit dem Modellbaumotor (Nennstrom 15A bei 11V) und oben gezeigter Konstruktion konnten zuerst maximal 1-2 W erzeugt werden. Durch schrittweise Optimierung der StabilitätStabilität des Aufbaus und der elektronischen Regelung konnte der Rekord auf 6 W gesteigert werden (Stand MärzMärz 2023).
Einen Durchbruch beim Regelalgorithmus stellt die „Impedanzregelung“„Impedanzregelung“ dar: Der dem Generator entnommene Strom wird so geregelt, dass der Regler wie ein konstanter Widerstand wirkt (Strom steigt proportional zur Spannung). Der simulierte Widerstand wird aus Nennspannung und Strom des Motors berechnet (11V / 15A = 0.73Ω)73Ω). Ob das bereits der optimale Wert ist, gilt es noch herauszufinden.
Weitere Versionen / Experimente
Update Juli 2024: Leider ist die Dokumentation auf dieser Seite etwas hinterher. Ich versuche, die Entwicklung überüber das letzte Jahr zusammenzufassen.
Version 2
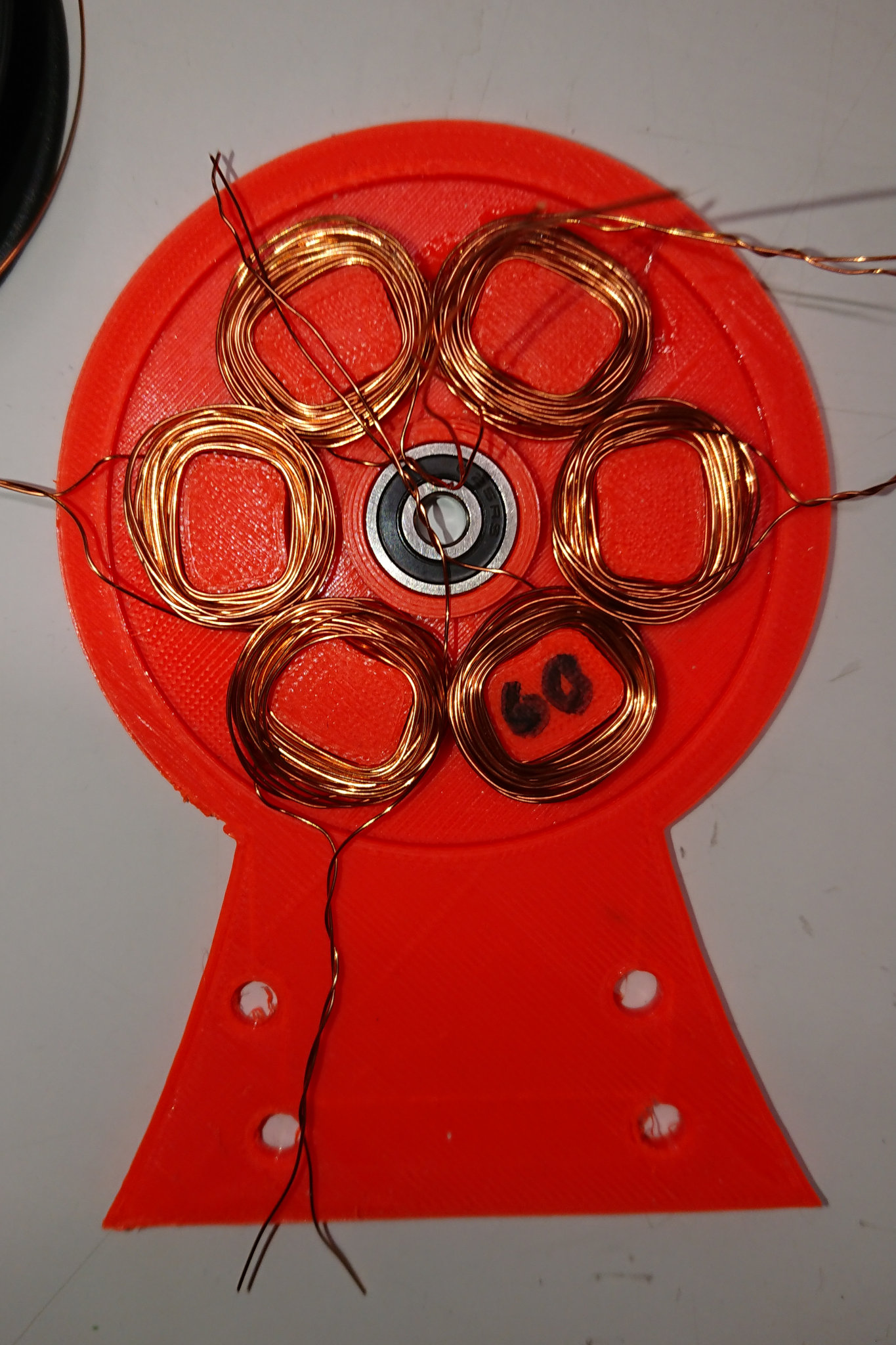
In Version 2 habe ich versucht, selbst einen kleinen Generator zu bauen. Es handelt sich um einen Scheibengenerator, wie er auch bei kleinen Windkraftanlagen gerne verwendet wird, allerdings herunterskaliert auf 10 cm Durchmesser.
Der Generator wurde in OpenSCAD entworfen, größtenteilsgrößtenteils 3D-gedruckt und verschraubt. Hier ein Screenshot des Modells:
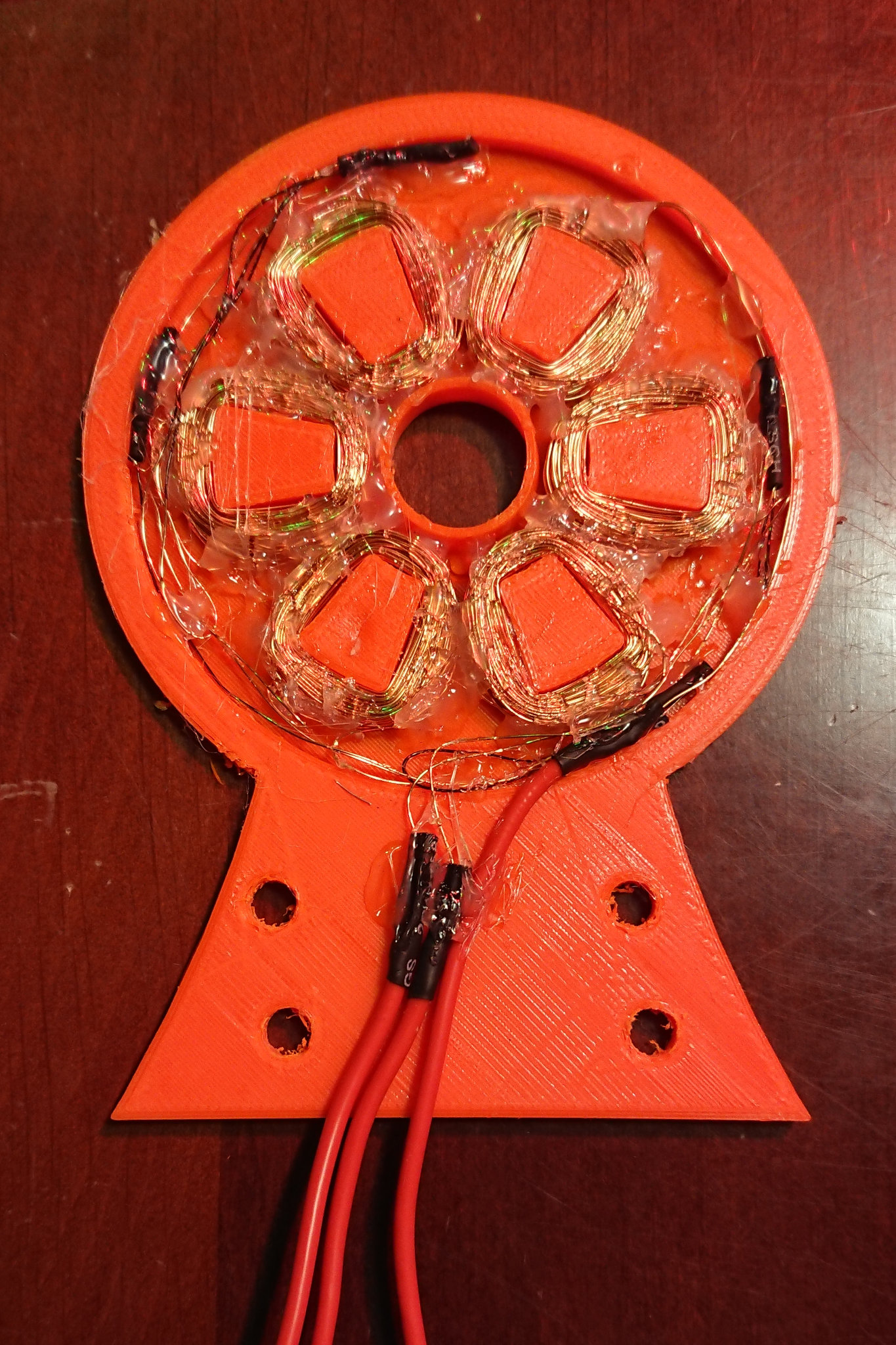
Der Stator (im Modell grün)grün) enthältenthält sechs Spulen. Es wurden verschiedene Versionen getestet, da die Ergebnisse nicht zufriedenstellend waren (zu geringe Leistung). Die folgenden Bilder zeigen zwei Varianten, wobei die zweite langgezogene Spulen hat, in der Hoffnung, das Magnetfeld am „Ausweichen“„Ausweichen“ hindern zu können.können. Die Spulen wurden mit HeißkleberHeißkleber am 3D-gedruckten Objekt befestigt.
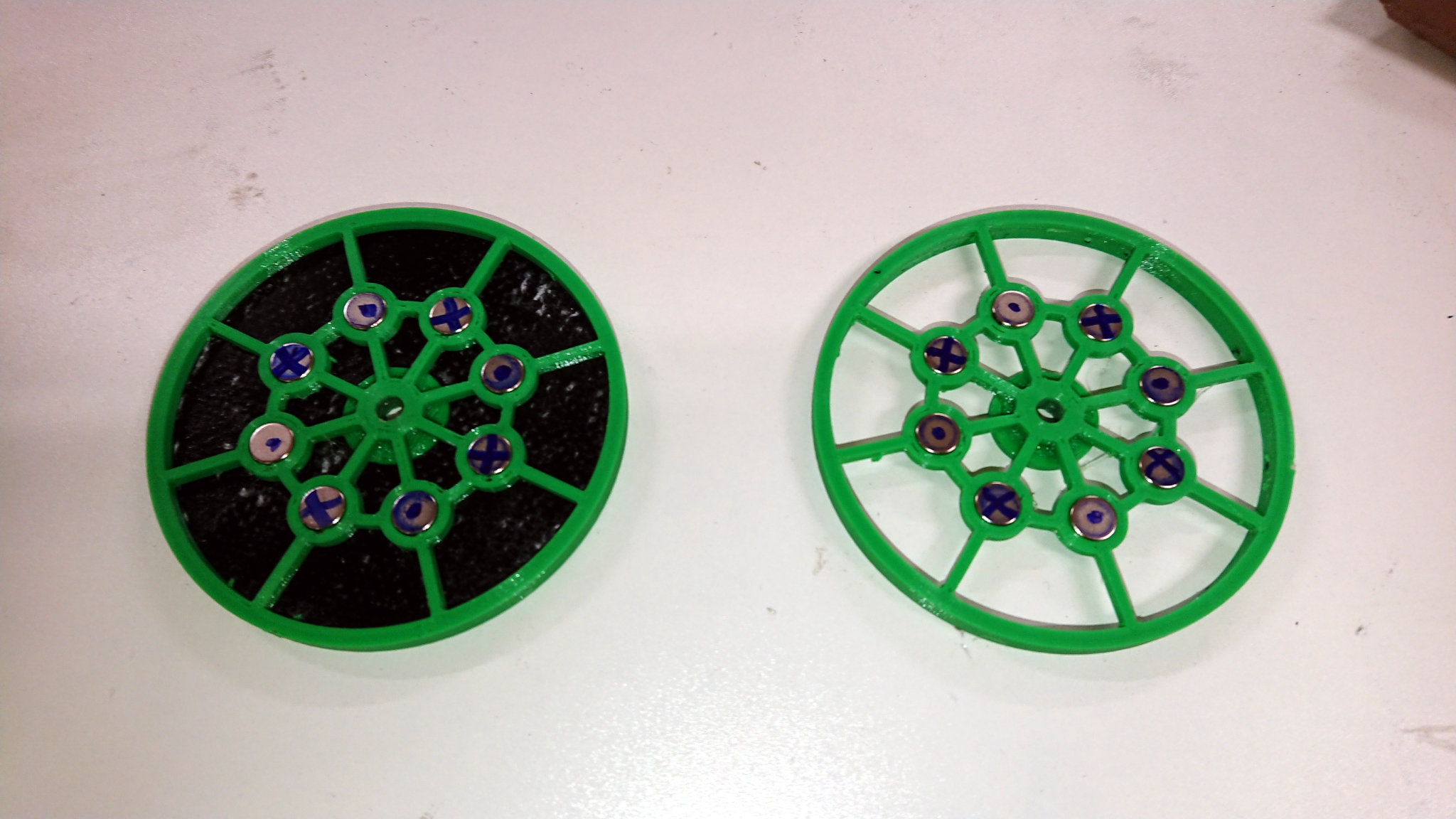
Die Rotoren (im Modell blau und rot) haben jeweils acht Magnete. Zur FührungFührung des Magnetfelds werden diese auf einer Stahlplatte angebracht, wie auf dem folgenden Bild gezeigt ist. Die Stahlplatte ist gegen Korrosion schwarz lackiert.
Alles zusammengebaut sieht dann wie folgt aus. Die Elektronik wurde unverändertunverändert von v1 übernommen.übernommen.
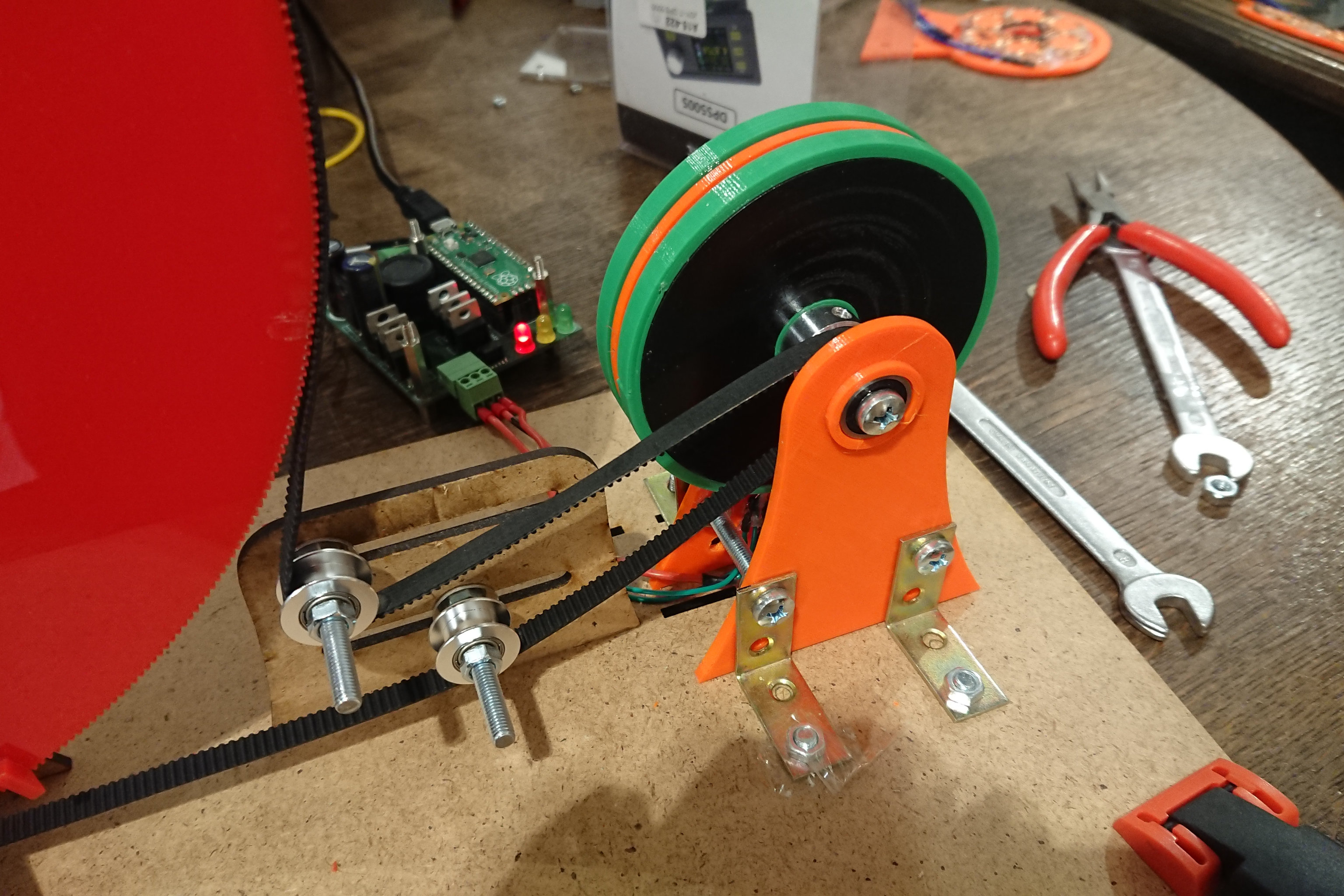
Dieser Versuch war leider nicht von Erfolg gekrönt;gekrönt; es konnten maximal 3W herausgeholt werden, trotz recht hoher Drehzahl. Vermutlich war der Luftspalt zwischen den Rotoren und auch zwischen Rotor und Stator zu groß,groß, um unter Last ein starkes Magnetfeld aufbauen zu können.können.
Diese Idee wird in Version 4 wieder aufgegriffen.
Version 3
In Version 3 wollte ich endlich einmal Leistung sehen. GlücklicherweiseGlücklicherweise ergab sich die Gelegenheit, dass Pollin einen Bosch-BLDC-Motor mit 580W Nennleistung sehr günstiggünstig im Angebot hatte. Dieser sollte nun endlich zweistellige Leistungswerte liefern.
Da nun größeregrößere mechanische KräfteKräfte absehbar waren, habe ich das Gestell aus Aluminiumprofil aufgebaut (danke an Tom DL5NEN fürfür das Bereitstellen des Materials). FürFür die Kugellager wurden Halterungen 3D-gedruckt und der Motor mit einem gelaserten Adapter befestigt. Die sonstigen Komponenten (Umlenkrollen, Kurbel, Antriebsrad, Riemen, etc.) wurden von den vorigen Versionen übernommen.übernommen.
Da nun höherehöhere Spannungen aus dem Generator absehbar waren, habe ich die Elektronik angepasst. Es war jedoch nur eine ÄnderungÄnderung der Ein- und Ausgangskondensatoren notwendig, so dass diese bis zu 30V aushalten. Bei den anderen Komponenten war das bereits der Fall.
Da die Nenndrehzahl des Motors bei überüber 3000 RPM liegt, ist weiterhin eine ÜbersetzungÜbersetzung nötig.nötig. Allerdings muss diese nicht so extrem wie beim ursprünglichenursprünglichen Modellbaumotor ausfallen. Ich habe daher eine ÜbersetzungÜbersetzung von etwa 1:6 gewählt.gewählt. Das nötigenötige Antriebsrad entstand im 3D-Drucker, wobei ich die Geometrie der Achse nutzen konnte, die auf einer Seite abgeflacht ist. Es gibt also keinen Schlupf zwischen Antriebsrad und Generatorachse.
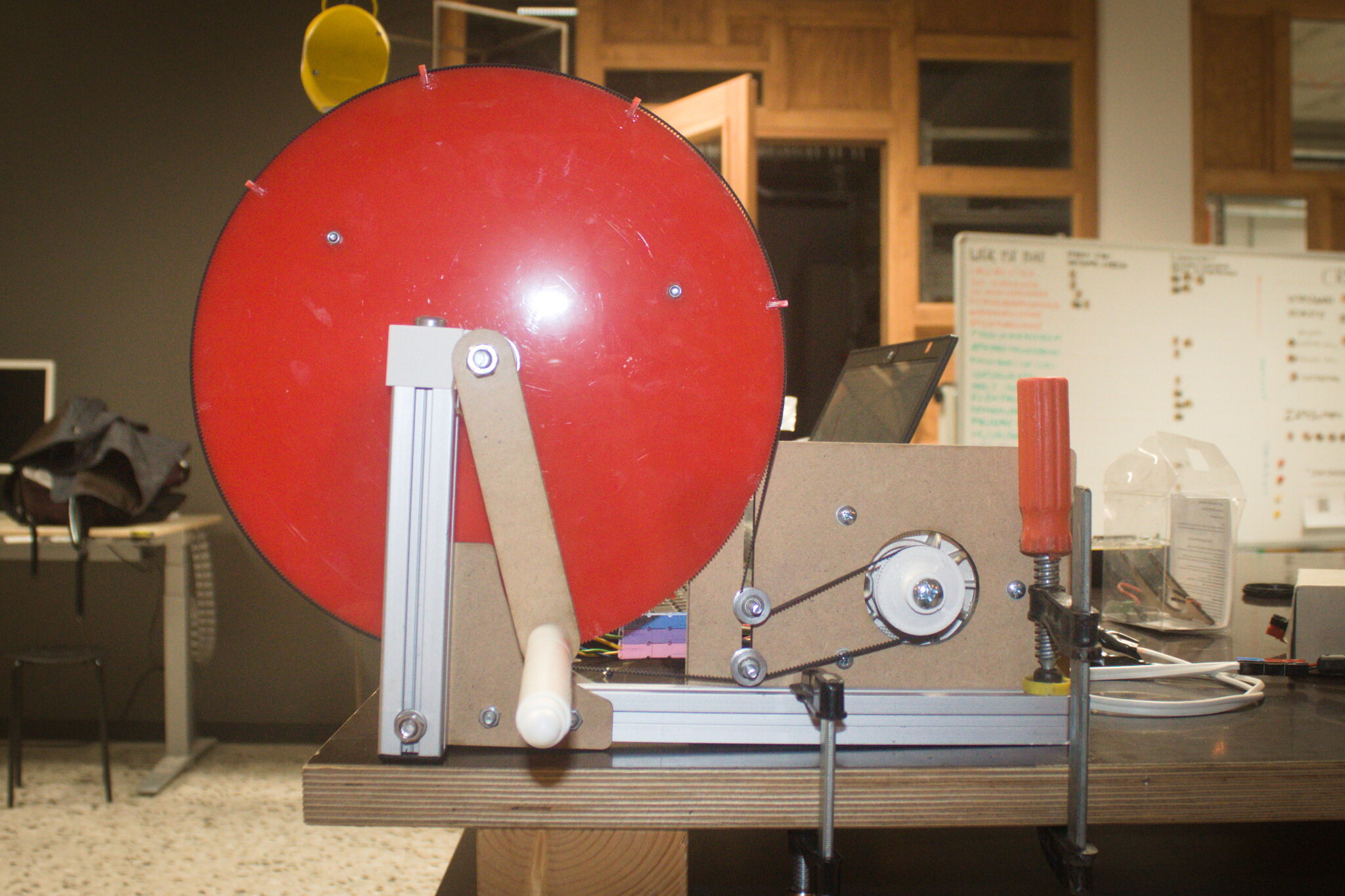
So sieht der gesamte Aufbau aus:
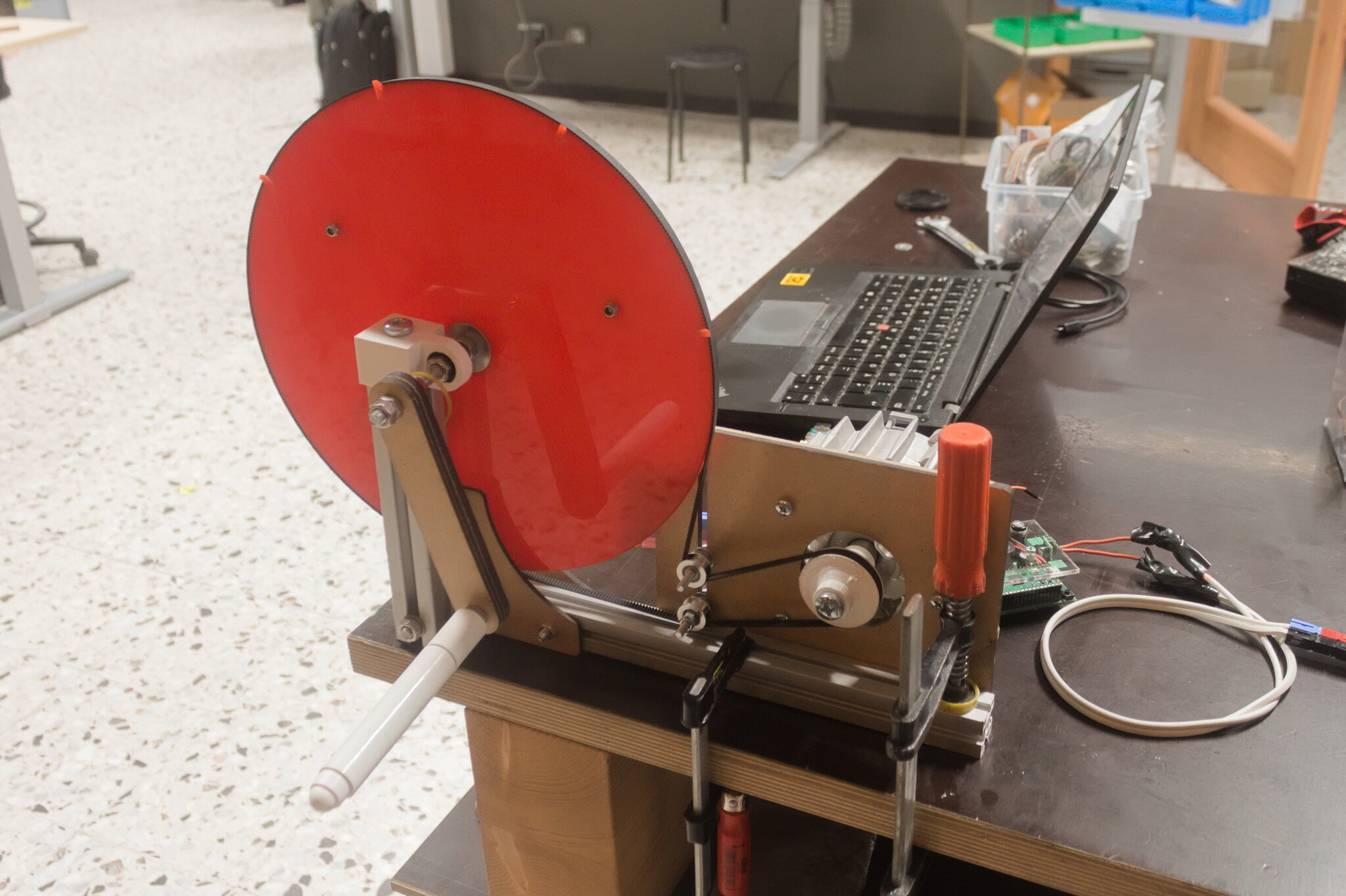
Der Generator ist im obigen Bild etwas schwer zu sehen, da er von der Adapterplatte verdeckt ist. Dieses Bild zeigt die andere Seite:
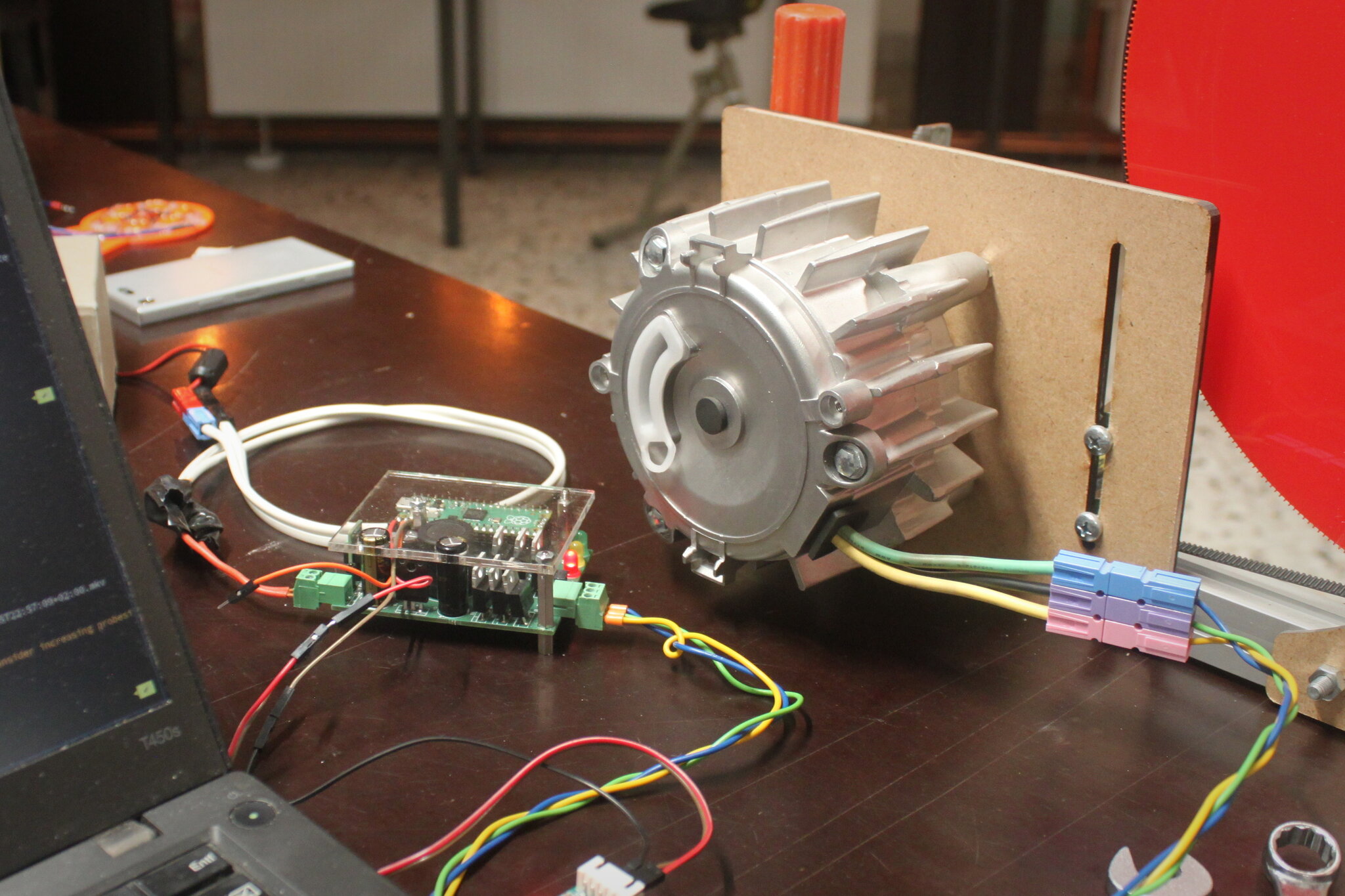
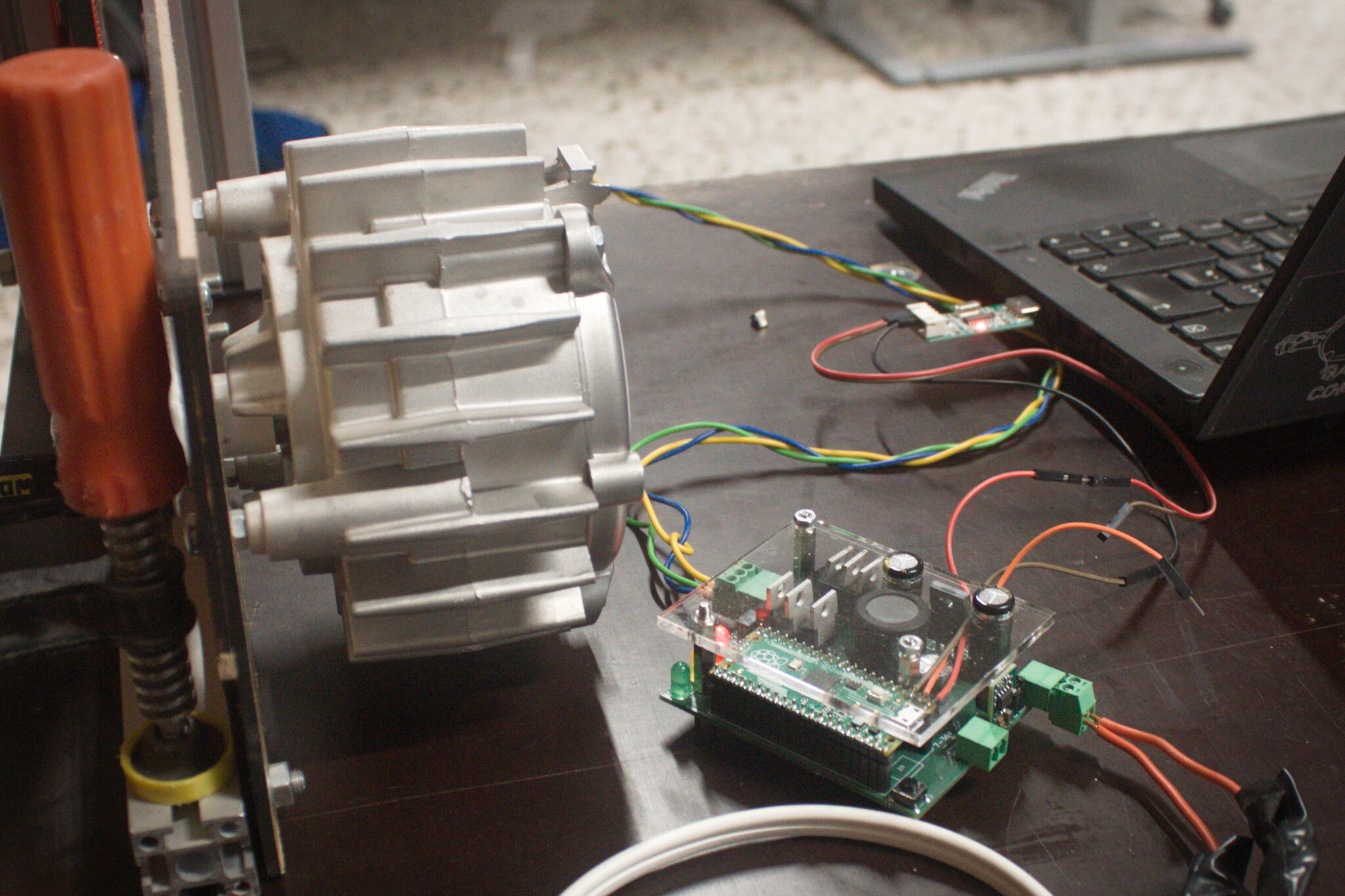
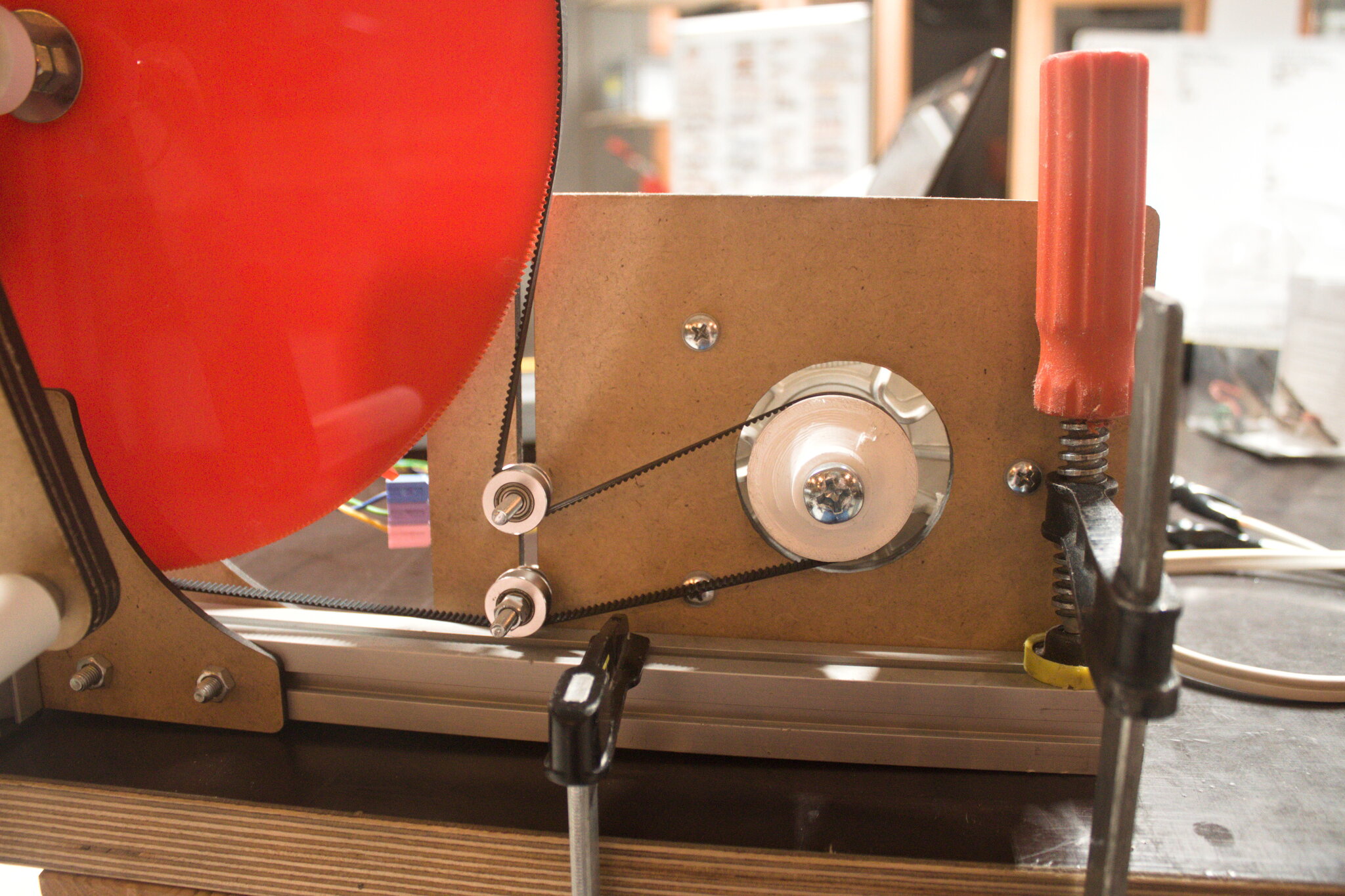
Und noch einige Detailaufnahmen:
In dieser Version gibt es auch erstmals ein Programm fürfür den PC, das die Daten aus der Elektronik aufbereitet und übersichtlichübersichtlich darstellt. Dieses ist im folgenden ÜbersichtsbildÜbersichtsbild auf dem Laptopbildschirm zu sehen:
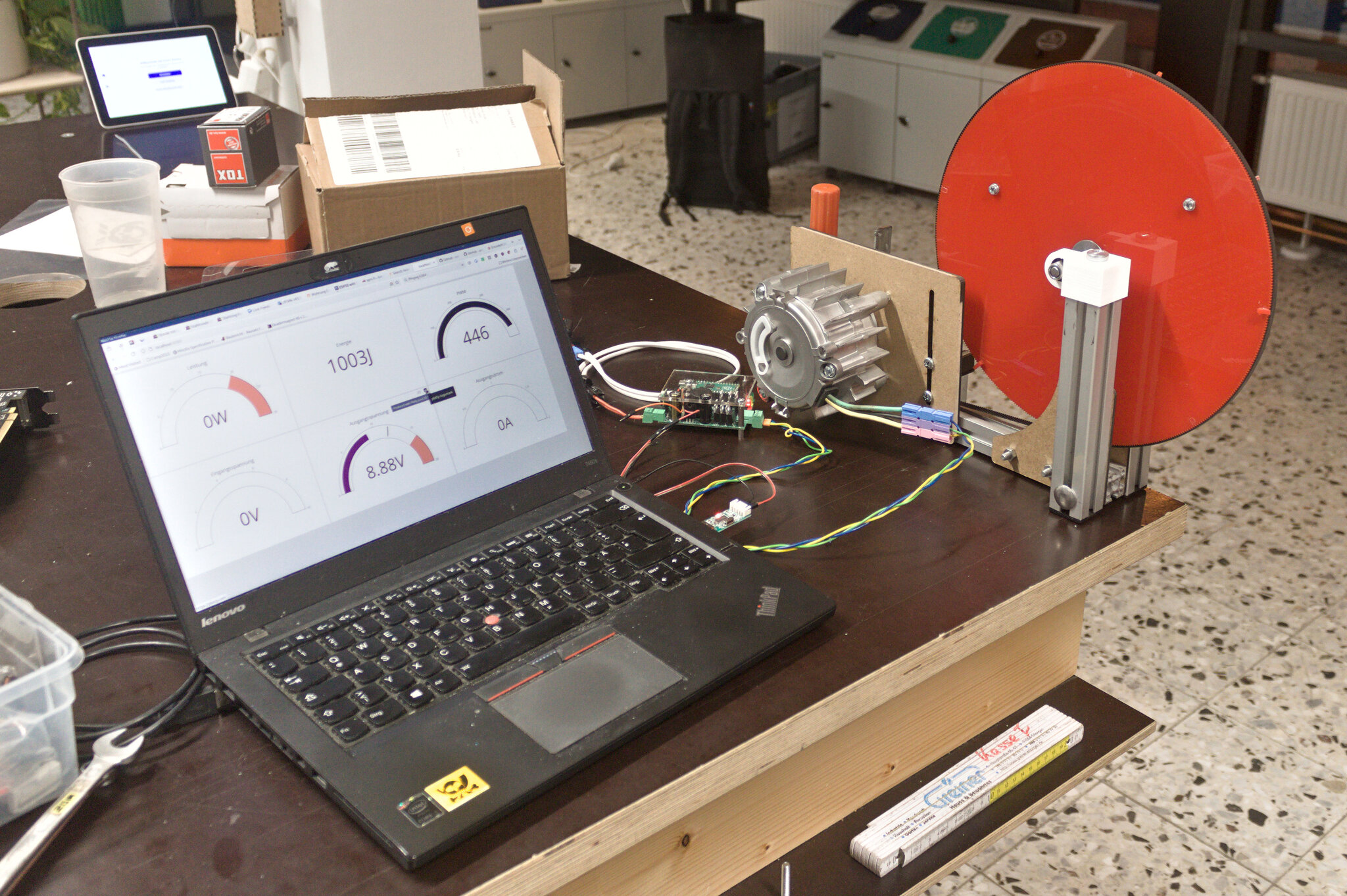
Mit dieser Version konnten endlich zweistellige Wattzahlen erreicht werden. Der Rekord liegt bei kurzzeitig 25W! Ausdauernde Kurbler*innen haben ihre Handys um mehrere Prozentpunkte aufgeladen (hier verdient thejohnny besondere Erwähnung,Erwähnung, der 30 Minuten durchgehalten hat :D ).
Zu guter Letzt gibt es noch ein kurzeDauer unbekanntskurzes Demovideo:
Leider ist ein Manko dieses Generators sein hohes Rastmoment, das fürfür starke Vibrationen und LärmLärm sorgt (insbesondere im niedrigen Drehzahlbereich). Auch der Wirkungsgrad lässtlässt etwas zu wünschenwünschen übrig,übrig, denn die Umlenkrollen und der Riemen werden nach ein paar Minuten merklich warm. Insgesamt funktioniert dieser Aufbau aber wesentlich besser als die vorherigen.